| VADEMECUM REMER |
| Glosarios |
| Glosario de términos relativos a los GNSS - Sistemas mundiales de navegación por satélite y GPS - Sistema de posicionamiento global |
| |
A | B | C | D | E | F | H | I | J | L | M | N | O | P | R | S | T | U | V | W | Z |
Término |
Descripción |
|---|---|
Método por el cual se transmiten muchas señales simultáneamente y en la misma frecuencia central, pero con distintos códigos de ensanchamiento; los receptores pueden distinguir entre las señales utilizando sus distintos códigos de ensanchamiento. |
|
Achatamiento |
Relativo a los Elipsoides. |
Acimut |
Ángulo horizontal, medido en el sentido de las manecillas del reloj, a partir de una dirección (como el Norte). |
Almanaque |
Datos orbitales primarios de satélite utilizados para calcular la posición, la hora de ascensión, la elevación y el azimut de un satélite. |
Altura elipsoidal |
Distancia vertical hasta el elipsoide de un usuario ubicado por encima de él. |
Altura geoidal |
Ver Ondulación geoidal. |
Distancia entre un punto de la superficie terrestre y la superficie del geoide, medida a lo largo del hilo de plomada (altura sobre el nivel medio del mar). |
|
Número entero desconocido de ciclos de fases portadoras obtenidas como doble diferencia que proceden de un par de satélites y son medidos por dos receptores. |
|
AMDC |
|
AMDF |
Acrónimo de Acceso múltiple por división de frecuencia. |
Ancho de banda |
Amplitud del espectro de una señal (representación de la señal en el dominio de la frecuencia), expresada en hercios. |
Ángulo cenital |
Ángulo vertical con un valor de 0º sobre el horizonte y 90° directamente sobre el usuario. |
Ángulo de corte |
Ángulo de elevación mínimo por debajo del cual los receptores de los GNSS ya no rastrean satélites. |
Ángulo de elevación |
Ángulo de elevación mínima por debajo del cual el sensor no rastrea ningún satélite GPS. |
Ángulo de enmascaramiento |
Elevación mínima aceptable sobre el horizonte a la que debe encontrarse un satélite GNSS para reducir al mínimo la distorsión atmosférica. |
Anti-spoofing (A-S) |
Código P encriptado (para formar el código Y). |
Aplanamiento (achatamiento) |
En los elipsoides: f = (a-b)/a = 1-(1-e2)1/2, donde a = semieje mayor, b = semieje menor, y e = excentricidad. |
Aproximación de precisión |
Procedimiento de aproximación mediante instrumentos, basado en una trayectoria lateral y una trayectoria de planeo vertical, que cumple los requisitos concretos establecidos para la navegación vertical y la infraestructura aeroportuaria. |
Aproximación no de precisión (NPA) |
En aviación, procedimiento de aproximación por instrumentos basado en una trayectoria lateral y sin guía vertical. |
Área del terminal (zona del terminal) |
Término general utilizado para referirse al espacio aéreo en que se prestan los servicios de control de aproximación o de control de tráfico aeroportuario. |
Arranque en frío |
Secuencia de encendido en que el receptor de GNSS no dispone de información previa y desconoce la hora y la posición, no cuenta con datos de almanaque sobre los satélites y debe descargar esos datos de almanaque antes de determinar una posición. |
Azimut |
Ángulo horizontal medido en el sentido de las agujas del reloj desde una dirección determinada (por ejemplo, el Norte). |
Baliza |
Transmisor estacionario que emite señales en todas las direcciones (llamado también baliza no direccional). |
Banda L |
Banda de radiofrecuencia entre los 1000 MHz y los 2000 MHz. Las frecuencias de las portadoras L1, L2 y L5 transmitidas por los satélites GNSS corresponden a esa banda L. |
Banda S |
Banda de 2 GHz a 4 GHz, que cruza el límite (artificial) entre las bandas decimétrica (UHF) y centimétrica (SHF) en los 3,0 GHz. Forma parte de la banda de microondas del espectro electromagnético. |
Radiotransmisión, por lo general de potencia relativamente baja, con impulsos sumamente cortos y un ciclo de trabajo más o menos reducido. Los impulsos extremadamente cortos tienen el efecto de dispersar la transmisión por una gama de frecuencias extensa. Característicamente, en la transmisión resultante se utilizan cientos de megahercios del ancho de banda. |
|
BIPM |
Acrónimo de Oficina Internacional de Pesos y Medidas. |
Cálculo (estimación) por mínimos cuadrados |
Cálculo de parámetros desconocidos que se realiza minimizando la suma de los cuadrados de los residuales de una medición. |
Cambio Doppler |
Cambio aparente en la frecuencia de una señal recibida debido al rango de cambio del intervalo entre el transmisor y el receptor. |
Canal |
Un canal de un receptor GNSS consta de la circuitería necesaria para rastrear la señal procedente de un solo satélite GNSS. |
Canal cuadrático |
Canal receptor GPS que multiplica por sí misma la señal recibida para obtener una segunda armónica de la fase portadora que no contiene el código de modulación. |
Canal de cuadratura |
Canal de un receptor de los GNSS que multiplica la señal recibida por sí misma para obtener un segundo armónico de la portadora, que no contiene la modulación de código. |
Canal receptor |
Radiofrecuencia y equipo físico digital, y programa informático de un receptor de GNSS, necesarios para rastrear la señal de un satélite GNSS en una de las frecuencias portadoras del sistema. |
Capacidad operativa inicial (IOC) |
Estado dependiente del sistema en que este se halla en condiciones de prestar un subconjunto predeterminado de los servicios para los cuales se concibió. |
Cartografía |
Arte o técnica de trazar mapas o cartas de navegar. |
CBOC |
Acrónimo de BOC compuesta (modulación por desplazamiento de portadora binaria). |
CELESTE |
Laboratorio de investigaciones relacionadas con los GNSS establecido y gestionado por el departamento de sistemas del Departamento Espacial del Laboratorio Nacional Aeroespacial (Países Bajos). |
Centelleo (ionosférico) |
Variaciones de la amplitud y la fase de la señal recibida causadas por la estructura irregular de las regiones ionosféricas. |
CET |
Acrónimo de Contenido total de electrones. |
Chip (segmento, datos codificados) |
Bit de un código de espectro. |
Cinemática en tiempo real (RTK) |
Procedimiento para resolver la ambigüedad de fase en el receptor de GNSS a fin de eliminar la necesidad de tratamiento "a posteriori". |
Círculo máximo |
Término empleado en navegación. Es la forma más corta de conectar dos puntos. |
Cobertura |
Zona de la superficie o volumen del espacio abarcados por un sistema de radionavegación en que las señales son suficientes para que el usuario pueda determinar la posición con un grado previsto de precisión. |
Código |
Serie o secuencia de valores binarios. |
Código C/A |
Es el Código de Adquisición Cruda que se envía en la señal L1 de GPS. Este código es una secuencia de modulaciones seudoaleatorias bifásicas binarias de 1023 MHZ en la banda de GPS con una modulación de 1.023 MHz, y presenta un período de repetición de un milisegundo. |
Señal estándar de determinación de la posición que transmite el satélite GNSS al usuario civil. |
|
Código de ruido pseudoaleatorio (código de pseudorruido) (PRN) |
Serie o secuencia binaria de longitud finita que cumple las tres condiciones siguientes: |
Código M |
Señal de uso militar del GPS. |
Código P |
Código preciso del GPS con una secuencia muy larga (aproximadamente 1014 bit) de modulaciones seudoaleatorias binarias bifásicas en la fase portadora GPS en un intervalo de chips de 10.23 MHz, que no se repiten a sí mismas durante 267 días. Cada segmento semanal del código P es único para cada satélite GPS, y se cambia también cada semana. El acceso al código P se restringe a usuarios autorizados por el gobierno de los E.U. |
Código Seudoaleatorio del Ruido (PRN) |
Cualquier grupo de secuencias binarias que parecen tener una distribución aleatoria como el ruido, pero que en realidad se pueden distribuir de manera ordenada. La propiedad más importante de los códigos PRN es que la secuencia tiene un valor mínimo de autocorrelación, excepto en un retraso de cero. |
Código Y |
Versión cifrada (o encriptada) del código P, que se transmite mediante un satélite del GPS al activarse el mecanismo de anti-spoofing (el mecanismo de protección contra la suplantación o falsificación de la onda). |
Comité Internacional sobre los Sistemas Mundiales de Navegación por Satélite (ICG) |
Entidad establecida con carácter voluntario como órgano oficioso destinado a promover la cooperación, según proceda, en asuntos de interés mutuo relacionados con los servicios civiles de navegación, determinación de la posición, cronometría y otros servicios de valor añadido basados en satélites, así como la compatibilidad e interoperabilidad entre los GNSS, y a aumentar su utilización en pro del desarrollo sostenible, especialmente en los países en desarrollo. Las funciones de la secretaría del Comité están a cargo de la Oficina de Asuntos del Espacio Ultraterrestre de las Naciones Unidas. |
Comparación del Retraso |
Técnica mediante la cual el código recibido (generado por el reloj del satélite) se compara con el código interno (generado por el reloj del receptor) y este último se adapta en tiempo hasta que se igualen los dos códigos. |
Compatibilidad |
Se entiende por compatibilidad la posibilidad de utilizar por separado o
conjuntamente los sistemas mundiales y regionales de navegación por satélite y sus aumentaciones sin causar interferencias inaceptables u otros problemas a un sistema o servicio determinado: |
Conferencia Mundial de Radiocomunicaciones (CMR) |
Conferencia organizada por la Unión Internacional de Telecomunicaciones, organismo especializado de las Naciones Unidas, para examinar y, en caso necesario, modificar el Reglamento de Radiocomunicaciones, tratado internacional que rige la utilización del espectro de radiofrecuencias y las órbitas geoestacionaria y no geoestacionaria de los satélites. Se celebra cada dos a cuatro años. |
Configuración del sistema de satélites |
Estado de la constelación de satélites en un momento determinado y en relación con un usuario o un grupo de usuarios determinado. |
Constante de gravitación (universal) |
Constante de proporcionalidad de la ley de gravitación universal de Newton, donde G = 6,672 x 10-11m3/s2/kg. |
Constelación |
Un grupo de satélites que funcionan en conjunto es una constelación de satélites. |
Constelación de satélites |
Disposición en el espacio de todo el conjunto de satélites de un sistema como el GPS. |
Contenido total de electrones (CTE) |
Número de electrones libres contenido en una columna cuya sección transversal es de 1 m por 1 m entre el receptor y el transmisor. La unidad común del CTE es 1016 e-/m2, y causa un retardo de 0,54 E-9 segundos a 1675,42 MHz. |
Continuidad |
Capacidad de un sistema en su totalidad (compuesto por todos los elementos necesarios para mantener la posición de una aeronave en el espacio aéreo definido) de cumplir su función sin interrupciones durante el período de funcionamiento previsto. Concretamente, la continuidad es la probabilidad de que el funcionamiento específico del sistema se mantenga durante una fase de actividad, en el supuesto de que ese sistema se hallaba disponible al comienzo de dicha fase de actividad. |
Control del tráfico aéreo |
Servicio a cargo de una autoridad competente para mantener expedito y seguro el flujo del tráfico aéreo. |
CONUS |
Acrónimo de Estados colindantes de los EE.UU. |
Coordenadas |
Conjunto de números que indica la ubicación de un punto en la Tierra o por encima de ella. Las coordenadas se basan habitualmente en líneas de referencia correspondientes a latitud y longitud, o en una proyección cuadricular del planeta o una región (por ejemplo, mediante el sistema de coordenadas Universal Transversal de Mercator (UTM) o Maidenhead). |
Coordenadas cartesianas |
Coordenadas de un punto en el espacio, representadas en tres dimensiones perpendiculares unas a otras (x, y, z) a partir del origen (sistema de coordenadas cartesianas). |
Coordenadas cartesianas geocéntricas (Sistema Internacional de Referencia Terrestre) (Coordenadas centradas y fijas en la Tierra (ECEF)) |
Sistema de coordenadas cartesianas cuyo origen es el centro de la masa de la Tierra y que se halla fijo en la superficie del planeta (es decir, rota con la Tierra). El eje Z está alineado con la media del eje de rotación de la Tierra (norte); el eje X, con el meridiano cero (de Greenwich), y el eje Y se encuentra a 90° al este del eje X, formando un sistema de coordenadas dextrógiro. |
Coordenadas geodésicas |
Coordenadas que definen un punto en relación con un elipsoide, utilizando valores de latitud, longitud y altura elipsoidal o coordenadas cartesianas. |
Corrección de errores en recepción (corrección de errores sin canal de retorno) (corrección intrínseca de errores) (FEC) |
Sistema de control de errores para la transmisión de datos, con el que el emisor agrega a sus mensajes datos redundantes, llamados también código de corrección de errores. |
CORS |
Acrónimo de Estaciones de referencia de funcionamiento continuo. |
COSMIC |
Sigla en inglés de Sistema de observación en constelación para la meteorología, la ionosfera y el clima |
Cumplimiento |
La observancia en la práctica, y el hecho de demostrarla, de una norma o reglamentación. |
Datos comprimidos (datos compactados) |
Datos primarios comprimidos (o compactados) durante un intervalo determinado (período de compresión o de compactación) para transformarlos en una sola variable observable (medición) a efectos de registro. |
Datos crudos |
Datos GPS originales, registrados y grabados por un receptor. |
Datos de mensaje |
Mensaje incluido en la señal GPS que informa de la ubicación del satélite, las correcciones del reloj y la salud. Se incluye también información general de las condiciones de otros satélites de la constelación. |
Datos primarios (datos en bruto) |
Datos originales de los GNSS recibidos y registrados por un receptor. |
Dátum |
Modelo matemático que describe una parte de la superficie de la Tierra. En el mapa impreso, las líneas de latitud y longitud utilizan como referencia un dátum cartográfico específico. |
Dátum geodésico |
Modelo matemático concebido para ajustarse lo mejor posible a una parte o a la totalidad del geoide definido por un elipsoide y la relación entre el elipsoide y un punto en la superficie topográfica establecido como el origen del dátum. |
dB |
Decibel, unidad de medida en escala logarítmica utilizada en acústica y electrónica. |
Derechos exclusivos; derechos de propiedad; derechos patentados |
Derechos que asisten a una parte, o propietario, que ejerce la propiedad privada, el control o el uso de un bien o producto y en virtud de los cuales ese bien o producto no es de dominio público. |
Desfase entre relojes |
Diferencia constante en la hora que marcan dos relojes. |
Desviación de la vertical (deflexión de la vertical) |
Ángulo formado por la normal al elipsoide y la vertical (hilo de plomada). |
Determinación cinemática de la posición (localización cinemática) |
Determinación de una serie cronológica de conjuntos de coordenadas para un receptor móvil, cada uno de los cuales se establece a partir de una sola muestra de datos y habitualmente se calcula en tiempo real. |
Determinación de la posición (localización) relativa |
Ver Determinación de la posición (localización) diferencial. |
Determinación de la posición |
Localización. |
Determinación de coordenadas relativas entre dos o más receptores que rastrean simultáneamente las mismas señales de GNSS. |
|
Determinación dinámica de la posición (posicionamiento dinámico) |
Determinación de la posición y la velocidad a partir de señales de los GNSS con la antena en movimiento. |
DGPS |
GPS Diferencial. Término que se aplica comúnmente para designar a un sistema GPS que emplea correcciones de código diferencial para obtener una precisión de posición entre 0.5 - 5m. |
Día sidéreo |
Lapso entre dos culminaciones o tránsitos sucesivos del equinoccio vernal. |
Día solar |
Lapso entre dos tránsitos superiores sucesivos del Sol. |
Diferencial |
Técnica utilizada para aumentar la precisión de un sistema de radionavegación determinando un error de localización en un punto conocido y transmitiendo ese error, o sus factores de corrección, a los usuarios de ese sistema de radionavegación en la misma zona. |
Medida estadística de la geometría de receptor y satélite(s). |
|
Dilución geométrica de la precisión |
Se compone de la dilución temporal de la precisión
(TDOP) y la dilución posicional de la precisión (PDOP), que se componen a su vez de la dilución horizontal de la precisión (HDOP) y la dilución vertical de la precisión (VDOP). |
Disponibilidad |
La disponibilidad de un sistema de navegación es el porcentaje de tiempo durante el cual pueden utilizarse sus servicios. |
Disponibilidad selectiva (SA) |
Degradación de la precisión de la posición puntual para los usuarios
civiles establecida por el Departamento de Defensa de los E.U. |
Diurno |
Que se repite durante el día; por ejemplo, efecto diurno. |
DOP |
|
DORIS |
Acrónimo de Sistema Doppler de orbitografía y radiolocalización integradas por satélite. |
ECEF |
Acrónimo de Coordenadas cartesianas geocéntricas. |
Efecto Doppler (desviación Doppler) |
Cambio aparente de frecuencia de una señal recibida, que se produce al variar la distancia entre el transmisor y el receptor. |
Efemérides |
Parámetros, por ejemplo, elementos keplerianos, que pueden utilizarse para calcular la posición de un satélite a una hora determinada. |
EGNOS |
Sistema Europeo de Complemento Geoestacionario de Navegación. El EGNOS suministra una señal de aumento al servicio normalizado de localización del GPS. Esa señal se transmite en la misma banda de frecuencia y con idéntica modulación que la señal civil L1 de código C/A (1575,42 MHz) del GPS. Mientras que el GPS utiliza señales de determinación de la posición y cronometría generadas desde vehículos espaciales que orbitan la Tierra, prestando con ello un servicio mundial, el EGNOS suministra información a efectos de corrección e integridad cuyo objeto es mejorar los servicios de navegación para la determinación de la posición en Europa. |
Elemento de validación en órbita de Galileo (GIOVE) |
Nombre de cada satélite de una serie que se viene construyendo para la Agencia Espacial Europea (ESA) a fin de someter a ensayo tecnología en órbita para el sistema Galileo de determinación de la posición. |
Elementos orbitales keplerianos |
Seis parámetros que describen la posición de un satélite en el espacio. Se trata de los siguientes: |
Elevación |
Altura sobre el Geoide. |
Elipsoide |
En geodesia, a menos que se indique otra cosa, figura matemática (a veces llamada también esferoide) formada al hacer girar una elipse alrededor de su eje menor. Un elipsoide va definido por dos cantidades, que se suelen expresar como la longitud del semieje mayor a) y el achatamiento f). |
Elipsoide local |
Elipsoide que se ha definido para ajustarse lo mejor posible a una parte determinada de la Tierra. Generalmente los elipsoides locales se ajustan a un país o grupo de países, como el elipsoide del Everest en el caso de la India. |
Emisiones fuera de banda |
Emisiones de radiocomunicaciones en bandas de frecuencia distintas del canal de frecuencia asignado al transmisor. El término se refiere habitualmente a las emisiones de un transmisor que se presenta en las bandas de frecuencia vecinas a la banda asignada a ese transmisor. |
Emplazamiento |
Lugar en que se ha instalado un receptor para poder determinar las coordenadas. |
En ruta |
Fase de la navegación que comprende las operaciones desde el punto de partida y la conclusión de la misión. En el caso de las misiones aéreas, la fase en ruta de la navegación tiene dos subcategorías, en ruta interna y en ruta oceánica. |
Enganche de retardo |
Técnica mediante la cual el código recibido (generado por el reloj del satélite) se compara con el código interno (generado por el reloj del receptor) y este último se desplaza cronológicamente hasta que ambos códigos coinciden. |
Época |
Instante fijo y determinado que se emplea como punto de referencia en una escala temporal. |
Equipo de medida de la distancia (DME) |
El que utiliza tecnología de radionavegación basada en transpondedores con la que se mide la distancia calculando el retardo en la propagación de señales radioeléctricas de muy alta frecuencia (ondas métricas) (VHF) o ultra alta frecuencia (ondas decimétricas) (UHF). |
Error (debido a la propagación) por trayectos múltiples |
Error de localización resultante de la interferencia entre ondas radioeléctricas que se han desplazado entre el transmisor y el receptor por dos trayectos de diferente longitud de onda. |
Error en distancia al usuario (URE) |
Error en el cálculo de la posición, la velocidad y la hora mediante el GPS atribuible a los segmentos espacial y de control del GPS. |
Error de las efemérides |
Diferencia entre la ubicación real del satélite y la predicha por los datos orbitales del satélite (efemérides). |
Error del equipo del usuario (UEE) |
Error atribuible al equipo del usuario en los valores de posición, velocidad y hora obtenidos mediante el GPS. |
Término que designa la parte correspondiente a la señal en el espacio (signal in space (SIS)) del balance de errores del GPS. |
|
Error multitrayectoria |
Error de posicionamiento, resultante de la interferencia entre las ondas de radio que han viajado entre el transmisor y el receptor por dos trayectorias de diferente longitud de onda. |
Error sistemático del reloj |
Diferencia entre la hora que marca un reloj y la hora de los sistema GNSS. |
ESD |
Sigla en inglés de Electricidad estática y descarga electrostática |
Espuria (relación) |
Relación matemática en la que dos acontecimientos no tienen nexo de causalidad, aunque pueda inferirse que lo tienen debido a un tercer factor oculto. |
Estaciones de referencia de funcionamiento continuo (CORS) |
Red de estaciones coordinadas por el Servicio Geodésico Nacional (NGS), que es una oficina del Servicio Oceánico Nacional del Organismo Nacional para el Estudio de los Océanos y la Atmósfera (NOAA) de los Estados Unidos. |
Estados colindantes de los EE.UU. (CONUS) |
Los 48 Estados colindantes o limítrofes de los Estados Unidos ubicados en el continente norteamericano y el Distrito de Columbia. |
Estimación por mínimos cuadrados |
Proceso de estimación de parámetros desconocidos que se efectúa minimizando la suma de los cuadrados de los residuales de una medición. |
Estocástico |
Proceso cuya evolución es no determinista, en el sentido de que el estado siguiente es determinado tanto por los cambios previsibles del proceso como por un elemento aleatorio. |
Razón desde la semidistancia focal de una elipse y su semieje mayor: donde a y b son el semieje mayor y el semieje menor, respectivamente, de la elipse. |
|
Experimento Clima y Recuperación de Gravedad (GRACE) |
Experimento realizado mediante dos satélites casi idénticos, lanzados en marzo de 2002, que entraron en órbita polar a 500 km de la Tierra a una distancia aproximada de 220 km uno del otro, con el objetivo principal de realizar mediciones extraordinariamente precisas del campo gravitacional. |
Fase de área del terminal |
Fase de la navegación que comprende las operaciones necesarias para iniciar o concluir una misión o función planificada en las instalaciones correspondientes. En el caso de las misiones aéreas, el área (o zona) del terminal es el espacio aéreo en que se presta el servicio de control de aproximación o de control de tráfico aeroportuario. |
||||||||||||||||||||||||||||
Fase de batido de la portadora |
Fase de la señal que queda cuando la señal de portadora con variación Doppler recibida del satélite bate (es decir, se genera la señal de frecuencia diferencial) con la frecuencia de referencia nominalmente constante generada en el receptor. |
||||||||||||||||||||||||||||
Fase observable |
|||||||||||||||||||||||||||||
Fase portadora |
Fracción de un ciclo, a menudo expresado en grados. Un ciclo completo equivale a 360°. |
||||||||||||||||||||||||||||
Diferencia entre la fase de la portadora GNSS entrante con desviación Doppler y la fase de una frecuencia de referencia nominalmente constante generada en el receptor. |
|||||||||||||||||||||||||||||
FEC |
Acrónimo de Corrección de errores en recepción. |
||||||||||||||||||||||||||||
Fecha juliana |
Número de días transcurridos desde el 1 de enero de 4713 a.C. La hora cero GPS se define como la medianoche HUC del sábado-domingo 6 de enero de 1980 en Greenwich. |
||||||||||||||||||||||||||||
Fiabilidad |
Capacidad del sistema de cumplir sin errores una función concreta, en condiciones y por un período determinados. |
||||||||||||||||||||||||||||
Frecuencia de batido |
Cualquiera de las otras dos frecuencias que se obtienen cuando se mezclan señales de dos frecuencias. |
||||||||||||||||||||||||||||
Frecuencia de Fase Portadora |
Frecuencia de la salida fundamental no modulada de un radiotransmisor. La frecuencia de la fase portadora GPS en L1 es de 1575.42 MHz y en L2 es de 1227.60 MHz. |
||||||||||||||||||||||||||||
Frecuencia fundamental |
La frecuencia fundamental empleada en GPS es de 10.23 MHz. Las frecuencias de fase portadora en L1 y L2 son múltiplos enteros de la frecuencia fundamental. |
||||||||||||||||||||||||||||
Frecuencia portadora |
Frecuencia de la salida fundamental no modulada de un radiotransmisor. |
||||||||||||||||||||||||||||
Frecuencia resultante |
Cualquiera de las dos frecuencias adicionales obtenidas al combinar las frecuencias de dos señales. Las frecuencias resultantes son iguales a la suma o la diferencia de las dos señales originales, respectivamente. |
||||||||||||||||||||||||||||
Frecuencia resultante de portadora |
Fase de la señal que permanece cuando la señal de portadora, proveniente del satélite, choca contra la frecuencia constante generada en el receptor. |
||||||||||||||||||||||||||||
Fuentes de error |
Existen diferentes fuentes de error que degradan la posición GPS desde algunos metros, en teoría, hasta algunas decenas de metros.
|
||||||||||||||||||||||||||||
Funcionamiento del localizador con orientación vertical (LPV) |
Modalidad de funcionamiento en que se establecen áreas de contención laterales comparables a las de un localizador ILS (sistema de aterrizaje por instrumentos) y altitudes de decisión (altitudes críticas) intermedias respecto de las utilizadas en las aproximaciones por LNAV y VNAV (navegación lateral y navegación vertical) y las aproximaciones por ILS de categoría I. |
||||||||||||||||||||||||||||
GAGAN |
Acrónimo de Sistema de navegación aumentado geoestacionario con GPS. |
Galileo |
|
GBAS |
Acrónimo de Sistema de aumentación en tierra. |
GDOP |
Acrónimo de Dilución geométrica de la precisión. |
GEAS |
Sigla en inglés de Estudio de la arquitectura evolutiva de los GNSS. |
Geocéntrico |
Relativo al centro de la Tierra |
Geodesia |
Estudio del tamaño y la forma de la Tierra. |
Geoide |
Superficie equipotencial que coincide con el nivel medio de los océanos prolongado imaginariamente hacia el interior de los continentes y es perpendicular en todos los puntos a la dirección de la fuerza de gravedad. |
GIOVE |
Acrónimo de Elemento de validación en órbita de Galileo. |
GLONASS |
El sistema GLONASS es un sistema de navegación por satélite similar al GPS pero con importantes diferencias. El sistema está administrado por las Fuerzas Espaciales Rusas para el Gobierno de la Confederación Rusa y tiene importantes aplicaciones civiles además de las militares. |
GMS |
Sigla en inglés de Estación terrestre de control. |
GMT |
|
GPB |
Ver Sonda de gravedad B. |
GPS |
|
Término utilizado habitualmente para referirse a un sistema de GPS en que se utilizan correcciones diferenciales para aumentar la exactitud de localización. |
|
GRACE |
Acrónimo de Experimento Clima y Recuperación de Gravedad. |
Gradicula |
Cuadrícula plana que representan las líneas de Latitud y Longitud de un elipsoide. |
Guiñada |
En los objetos en movimiento, se refiere al movimiento lateral en torno a la vertical (o hacia la derecha o la izquierda en la dirección del desplazamiento). |
HDOP |
Dilución horizontal de la precisión. |
HMI |
Información equívoca peligrosa. |
Hora (del) GLONASS |
Escala de tiempo atómica similar a la del GPS. Corresponde a la HUC de la Federación de Rusia (cuya sigla en inglés es UTC (SU), es decir, HUC de la Unión Soviética, por el antiguo nombre del país). El segmento de control mantiene la hora GLONASS con un desfase de 1 ms, aunque habitualmente inferior a un microsegundo (µs) de la UTC (SU), y la parte restante del desfase se transmite en el mensaje de navegación. |
Hora (del) GPS |
Sistema horario continuo transmitido por los satélites GPS, que tiene como referencia la HUC del Observatorio Naval de los Estados Unidos, pero sin la inserción de segundos intercalares. Véase también UTC (USNO). |
Hora exacta |
Hora calculada con un margen de error de 10 milisegundos. |
Hora local |
La hora local es igual a la hora GMT más el huso horario. |
Hora solar media en el meridiano de Greenwich. Se utiliza como base de la hora legal en todo el mundo. |
|
Hora universal (UT) |
Hora solar media local en el meridiano de Greenwich. Resultaría de mayor pertinencia la UTI, que es una escala cronométrica basada en la rotación de la Tierra. |
Hora universal coordinada (HUC) |
Escala cronológica atómica establecida por la Oficina Internacional de Pesos y Medidas (BIPM) y basada en mediciones aportadas por muchos laboratorios nacionales de cronometría, cada uno de los cuales ha establecido su respectiva HUC local. La unidad de la escala se mantiene lo más cerca posible del segundo del Sistema Internacional de Unidades (SI), pero en ella se insertan ocasionalmente segundos intercalares para ajustarla a las irregularidades de la rotación de la Tierra. |
Huso horario |
Huso horario = hora local, hora media de Greenwich (GMT). La hora GMT es aproximadamente igual a la hora GPS. |
IERS |
Ver Servicio Internacional de Sistemas de Referencia y Estudio de la Rotación de la Tierra. |
ILRS |
Servicio Internacional de Telemetría por Láser |
Inclinación |
Ángulo entre el plano orbital de un satélite y el ecuador. |
Interferencia deliberada (electromagnética) |
Utilización intencional de radiación o rerradiación, o reflejo de energía electromagnética, para impedir o reducir la utilización eficaz de una señal. |
Interferometría de muy larga línea de base (VLBI) |
Técnica utilizada en radioastronomía y geodesia, en la que se utilizan varios radiotelescopios muy separados entre sí para observar simultáneamente el mismo objeto y guardar los resultados de esas observaciones registrando su hora exacta. Esos datos se combinan luego para utilizarlos como si se hubieran obtenido mediante un solo instrumento con gran capacidad de resolución. |
Interoperabilidad |
Posibilidad de utilizar conjuntamente los sistemas mundiales y regionales de navegación por satélite y sus aumentaciones y los servicios que prestan, de manera tal que los usuarios puedan aprovechar mejor sus capacidades que cuando reciben únicamente
las señales abiertas de un solo sistema: |
Intervalo de sesgo entero |
Ver Ambigüedad. |
Ionosfera |
Región de la atmósfera ubicada entre 50 km y alrededor de 1.000 km por encima de la Tierra, en la que hay electrones libres (debido a la ionización causada por la radiación solar, principalmente la ultravioleta), lo cual afecta a la transmisión de las señales de los GNSS. |
ITRS |
Ver Sistema Internacional de Referencia Terrestre. |
Jasón |
Satélite oceanográfico lanzado en diciembre de 2001, que se mantiene en una órbita inclinada de 66° a 1.300 km de la Tierra. Su misión es observar la circulación mundial de los océanos, estudiar las relaciones entre estos y la atmósfera, mejorar los pronósticos y la predicción del clima mundial y vigilar fenómenos como El Niño y los torbellinos oceánicos. |
Laboratorio de retropropulsión |
Laboratorio administrado por Caltech en nombre de la NASA, que realiza misiones no tripuladas de exploración del sistema solar. |
Latitud (geodésica) |
Ángulo entre la normal elipsoidal y el plano ecuatorial. Tiene un valor nulo sobre el ecuador y de 90° en los polos. |
Levantamiento |
Acción de realizar observaciones para determinar el tamaño y la forma del objeto de observación, así como la posición absoluta o relativa de un punto en la superficie de la Tierra o por encima o por debajo de ella, la longitud y dirección de una línea, el campo gravitacional del planeta, la duración del día, etc. |
Levantamiento estático |
Término que se utiliza en relación con los GNSS y se refiere a todas las aplicaciones para levantamientos no cinemáticos. Esas aplicaciones comprenden las dos modalidades siguientes de operación: levantamiento estático y levantamiento estático rápido. |
Levantamiento estático rápido |
Término utilizado en relación con los GNSS para denominar
un levantamiento estático con períodos breves de observación. |
Levantamiento Parar y Seguir |
El término de Levantamiento Parar y Seguir se emplea en conjunción con el sistema GPS para designar un tipo especial de levantamiento cinemático. Posterior a la inicialización (para determinar las ambigüedades) en el primer punto, el receptor móvil se desplaza a los demás puntos sin perder la señal de ningún satélite. Solo se requieren unas cuantas épocas en estos otros puntos para obtener una solución con la precisión requerida. Si ocurre una pérdida de señal, se debe iniciar nuevamente. |
Levantamiento por desplazamiento intermitente |
El término levantamiento por desplazamiento intermitente se emplea en relación con el GPS para referirse a un tipo especial de levantamiento cinemático. Tras la inicialización (la determinación de ambigüedades) en el primer emplazamiento, el receptor móvil debe desplazarse entre los demás emplazamientos sin perder la señal de satélite. |
Línea base |
Longitud del vector tridimensional entre un par de estaciones en las que se han registrado simultáneamente datos GPS y se procesan con técnicas diferenciales. |
Línea de rumbo |
Término empleado en navegación. Trayectoria entre dos puntos con rumbo constante. |
Línea loxodrómica |
Término utilizado en navegación. Trayectoria entre dos puntos con marcación constante. |
Localización (determinación de la posición) puntual |
Determinación de la posición (latitud, longitud y altitud sobre el esferoide) mediante observaciones de la pseudodistancia. |
Longitud |
Ángulo entre la elipse del meridiano que pasa por Greenwich y la elipse del meridiano que pasa por el punto en cuestión. De este modo, la longitud es de 0° en Greenwich y se mide hacia el Este en 360°, o hacia el Este y el Oeste con valores respectivos de 180°. |
Longitud de banda |
Medición del ancho del espectro de una señal (representación del dominio de la frecuencia de una señal) expresada en Hertz. |
Longitud de referencia (o línea base) |
Longitud del vector tridimensional entre un par de estaciones en que se han registrado simultáneamente datos del GPS que se han sometido a tratamiento con técnicas diferenciales. En el nivel aproximado de una parte por mil millones, que corresponde a los GNSS en escalas planetarias, la definición precisa de la longitud requiere aplicar aspectos de las teorías especial y general de la relatividad, lo que supone una dependencia de los campos geopotenciales locales. |
MADRAS |
Sigla en inglés de Análisis y detección por microondas de sistemas de pluviosidad y atmosféricos. |
Maidenhead |
Sistema de coordenadas que utilizan los radioaficionados, en que el mundo se divide en 324 grandes zonas basadas en la latitud y la longitud. Esas zonas abarcan 10 grados de latitud por 20 grados de longitud y se llaman campos. Cada campo se divide en 100 cuadrados de 1° por 2°. |
Marcación (rumbo, derrota, demora) |
Término utilizado en navegación para indicar el ángulo entre una dirección de referencia (por ejemplo, el norte geográfico, el norte magnético o el norte del cuadriculado) y la trayectoria. |
MÁSER |
Dispositivo que produce ondas electromagnéticas coherentes mediante amplificación por emisión estimulada. Históricamente, el término proviene de la sigla en inglés de Amplificación de microondas por emisión estimulada de radiación, aunque los máser modernos emiten radiación en una región ancha del espectro electromagnético. |
MBOC |
Sigla en inglés de Modulación por desplazamiento de portadora binaria multiplexada |
MCS |
Sigla en inglés de Estación central de control |
Mediciones diferenciales |
Las mediciones GPS se pueden diferenciar entre receptores, entre
satélites o a lo largo de un cierto tiempo. Aunque existen varias combinaciones posibles, por convención las mediciones de fase GPS se diferencian en el orden aquí descrito: primero entre los receptores, después entre los satélites y por último a lo largo del tiempo. |
Las diferencias simples son las que se obtienen habitualmente en las mediciones de receptores que observan simultáneamente el mismo satélite; las diferencias dobles son normalmente diferencias simples entre observaciones simultáneas diferentes de dos satélites; y las diferencias triples son habitualmente diferencias dobles de hora. |
|
Mensaje de datos |
Datos transmitidos por los satélites de los GNSS que se utilizan para calcular la ubicación del satélite y corregir la hora que marca su reloj. |
Mensaje de navegación de los GNSS |
Mensaje de datos enviado desde el satélite que contiene la efeméride y la corrección del reloj del satélite, así como información sobre el estado de la constelación y el almanaque, etc. |
Mensajes de navegación/datos de navegación |
Datos que se introducen en las señales del satélite mediante modulación. |
Meridiano |
Línea imaginaria que une el Polo Norte con el Polo Sur y pasa por el ecuador a 90°. |
Modo (modalidad) cuadrático(a) de recepción |
Método empleado para la recepción de señales del GPS en L2, que se duplica la frecuencia de portadora y no se utiliza el código P. |
Modulación binaria bifásica |
Cambio de fase de 0° o de 180° (para representar 0 o 1 en binario, respectivamente) en una fase portadora constante. |
Modulación por desplazamiento de fase bivalente (MDFB) mediante símbolos rectangulares |
Modulación en que se utiliza una sola transición instantánea de fase de 180° por símbolo. |
Modulación por desplazamiento de portadora binaria (BOC) |
Extensión de la modulación BPSK-R en que cada símbolo corresponde a la misma parte de una onda cuadrada, y se modula mediante rotación de fase en 180°. |
MSAS |
Sigla en inglés de Sistema de aumentación basado en satélites del satélite multifuncionales de transporte (MTSAT). Sistema de navegación aérea creado por la Dirección de Aviación Civil del Japón para aumentar el GPS. |
Muy alta frecuencia |
Ondas métricas (VHF). Radiofrecuencia en la banda de 30 MHz a 300 MHz. |
Nanosegundo (ns) |
Milmillonésima de segundo. |
NASA |
Sigla en inglés de Administración Nacional de Aeronáutica y del Espacio de los Estados Unidos. |
NAVCEN |
Una de las siglas en inglés del Centro de Navegación del Servicio de Guardacostas de los Estados Unidos. |
Navegación |
Actividad consistente en planificar, registrar y controlar el desplazamiento de una embarcación, aeronave o vehículo de un lugar a otro. |
Navegación de área (RNAV) |
Método de navegación con el que las aeronaves pueden utilizar cualquier trayectoria de vuelo que se halle bajo la cobertura de sistemas de navegación con referencia en una estación terrestre o se ajuste a la capacidad de sistemas autónomos, o ambas cosas. |
NAVSTAR |
Acrónimo de Navigation System with Time and Ranging, nombre original del sistema GPS. |
NAVTEX |
Sistema creado por la Organización Marítima Internacional (OMI) que se utiliza en todo el mundo como medio principal para transmitir información urgente sobre seguridad marítima y costera destinada a las embarcaciones. |
NDGPS |
Sigla en inglés de GPS diferencial de cobertura nacional |
NMEA |
Sigla en inglés de Asociación Nacional de Electrónica Marina. |
NOAA |
Sigla en inglés de Organismo Nacional para el Estudio de los Océanos y la Atmósfera de los Estados Unidos. |
NPA |
Acrónimo de Aproximación no de precisión. |
Observable de fase |
|
OD&TS |
Sigla en inglés de Determinación de la órbita y sincronización de la hora |
Oficina Internacional de Pesos y Medidas - BIPM |
Organización internacional de establecimiento de normas (Bureau international des poids et mesures, en francés), una de las tres establecidas para mantener el Sistema Internacional de Unidades (SI) con arreglo a lo dispuesto en la Convención del Metro. Para referirse a esta organización se suele utilizar su sigla en francés, BIPM. |
Distancia de la superficie del elipsoide de referencia al geoide, medida a lo largo de la normal al elipsoide. |
|
Órbita geosíncrona |
Órbita en que un satélite gira en torno a la Tierra a la misma velocidad de rotación del planeta. Un satélite en órbita geosíncrona parece estacionario si se observa desde un punto ubicado en el ecuador o cercano a él. |
OTB |
Órbita terrestre baja (Low Earth Orbit). |
PDOP |
Sigla en inglés de Dilución de la precisión de la posición. |
Plena capacidad operativa (FOC) |
Estado que depende del sistema, al que se llega cuando que este se halla en condiciones de prestar todos los servicios para los que se concibió. |
PNT |
Sigla en inglés de Localización, navegación y cronometría. |
Polarización |
Orientación de las oscilaciones de una onda. |
Portadora |
Onda radioeléctrica que tiene por lo menos una característica (por ejemplo, frecuencia, amplitud o fase) cuyo valor de referencia conocido puede modificarse mediante modulación. |
Posicionamiento cinemático |
Determinación de una serie de tiempo o de coordenadas para un receptor móvil. Cada serie de coordenadas se determina a partir de una sola muestra de datos y se generalmente se calcula en tiempo real. |
Determinación de coordenadas relativas entre dos o más receptores que rastrean simultáneamente las mismas señales GPS. |
|
Posicionamiento diferencial corregido |
Más comúnmente conocido como DGPS, el cual proporciona precisiones del orden de 0.5-5 m. |
Posicionamiento diferencial de fase |
Ofrece una precisión de 0.5-20 mm. |
Posicionamiento puntual |
Reducción independiente de observaciones efectuada por un receptor en particular, empleando la información de seudorangos transmitida por los satélites. |
Posicionamiento relativo |
|
Post proceso |
Proceso de calcular posiciones en tiempo no real, empleando datos previamente colectados por receptores GPS. |
Precisión (exactitud) |
Medida de la desviación entre la posición estimada de un satélite
con su posición real. La precisión del sistema de radionavegación se presenta habitualmente como medición estadística del error del sistema, y puede corresponder a uno de las tres categorías siguientes: |
Propagación |
Desplazamiento de una onda electromagnética (radioeléctrica) por un medio (por ejemplo, la atmósfera o el espacio) a la velocidad de la luz. La velocidad y otras características de la onda se modifican según el medio por el que se desplace. |
Propagación por trayectos múltiples |
Fenómeno de propagación en virtud del cual las señales llegan a la antena receptora por dos o más trayectos. |
Protección contra suplantación (o piratería) de señal |
Cifrado o encriptación del código autorizado para impedir la manipulación indebida de las señales mediante la transmisión de señales falsas. |
Proyección conforme (proyección ortomorfa) |
Proyección cartógráfica que conserva los ángulos del elipsoide después de haberlos proyectado en el plano. |
Proyección de Lambert |
Proyección cartográfica cónica conforme que proyecta un elipsoide sobre una superficie plana, utilizando un cono sobre la esfera como figura de referencia. |
Proyección transversal de Mercator |
Proyección cartográfica cilíndrica conforme que puede visualizarse como un cilindro que envuelve la Tierra. |
Variante de la proyección transversal de Mercator. |
|
Pseudodistancia |
Tiempo aparente de propagación de la señal entre el satélite y la antena del receptor que se expresa en escala de distancia al multiplicarlo por la velocidad de la luz. La pseudodistancia difiere de la distancia real por la influencia de los relojes del satélite y del usuario. |
Pseudosatélite |
Estación de GNSS diferencial (DGNSS) basada en tierra que transmite correcciones del DGNSS en una señal cuya estructura es similar a aquella de la que envía un satélite de los GNSS real. |
Punto ciego de la RAIM |
Aquel en que no se encuentran visibles por los menos cinco satélites de los GNSS. |
Radioastronomía |
Rama de la astronomía que estudia los objetos celestes en sus frecuencias radioeléctricas. |
Radiodeterminación |
Determinación de la posición, u obtención de información sobre ella, mediante las propiedades de propagación de las ondas radioeléctricas. |
Radiolocalización |
Radiodeterminación con fines distintos de los de la radionavegación. |
Radionavegación |
Determinación de la posición, u obtención de información relativa a ella, con fines de navegación, utilizando las propiedades de propagación de las ondas radioeléctricas. |
Radioocultación |
Técnica de teleobservación utilizada para medir las propiedades físicas de la atmósfera de un planeta. |
RAIM |
Sigla en inglés de Vigilancia autónoma de la integridad de los receptores. |
Rango |
Término empleado en navegación para referirse a la longitud de la trayectoria entre dos puntos. Normalmente, esta trayectoria es el círculo máximo o la línea de rumbo. |
Rango de Error del Usuario (UERE) |
Contribución al rango de medición del error de una fuente individual de error, convertida en unidades del rango, asumiendo que la fuente de error no está relacionada con el resto de las fuentes de error. |
Reloj atómico |
Reloj cuyo sistema de cronometría se basa en la frecuencia de transición electrónica de un átomo como patrón de frecuencia para su elemento de cronometría. Los elementos que se utilizan habitualmente son el cesio o el rubidio. |
Requisitos mínimos de navegación (prestaciones de navegación requeridas) |
Precisión de las prestaciones de navegación necesarias para operar en un espacio aéreo definido, ajustándose a los parámetros de funcionamiento de los sistemas de navegación utilizados en ese espacio aéreo. |
Retardo de propagación troposférica |
Retardo temporal que afecta a las señales de satélite al cruzar los estratos troposféricos de la atmósfera neutral de la Tierra. |
Retardo ionosférico |
El retardo que sufren las ondas que se propagan por la ionosfera (que es un medio no homogéneo y dispersivo). El retardo de fase y el retardo envolvente (o de grupo) son de la misma magnitud, pero de signo opuesto, y son proporcionales al contenido electrónico total (CET). |
Retícula |
Cuadrícula de un plano que representa las líneas de latitud y longitud de un elipsoide. |
Retraso de la propagación atmosférica |
Retraso de tiempo que afecta a las señales de los satélites, debido a la ionosfera y troposfera, que son capas atmosféricas de la Tierra. |
Retraso del reloj |
Diferencia constante en la lectura de la hora en dos relojes. |
Retraso ionosférico |
La propagación de una onda a través de la ionosfera (que es un medio heterogéneo y dispersante), experimenta un retraso. El retraso de la fase depende del contenido de electrones y afecta las señales de la fase portadora. El retraso de grupos depende también de la dispersión de la ionosfera y afecta la modulación de las señales (códigos). El retraso de la fase y de los grupos es de la misma magnitud pero de signo contrario. |
RFI |
Sigla en inglés de Interferencia de radiofrecuencia |
RINEX |
Sigla en inglés de Formato de intercambio independiente del usuario. Se trata de un conjunto de definiciones y formatos normalizados para promover el libre intercambio de datos de los GNSS en formato ASCII estándar. |
RTCM |
Sigla en inglés de Comisión Técnica de los Servicios de Radiocomunicaciones Marítimas, establecida para definir un radio enlace diferencial de datos para retransmitir mensajes de corrección GPS a partir de una estación de control a los usuarios en campo. |
RTK |
Acrónimo de Cinemático en Tiempo Real. Término empleado para describir el proceso mediante el cual, se resuelven las ambigüedades de fase en el receptor GPS, de manera que ya no es necesario el post-proceso. |
Rumbo |
Término empleado en navegación para describir el ángulo entre una dirección de referencia (por ejemplo, norte geográfico, norte magnético, norte de cuadrícula) y la trayectoria. |
Ruta ortodrómica |
Término utilizado en navegación. La línea más corta que une dos puntos. |
Salto de ciclo |
Discontinuidad observada en la medición de la fase de batido de la portadora, equivalente a un número entero o semientero de ciclos. |
Segmento de control |
Equipo de los GNSS situado en tierra que utiliza el proveedor de servicios para rastrear las señales de los satélites, determinar su órbita y transmitir órdenes y definiciones de órbitas a esos satélites. 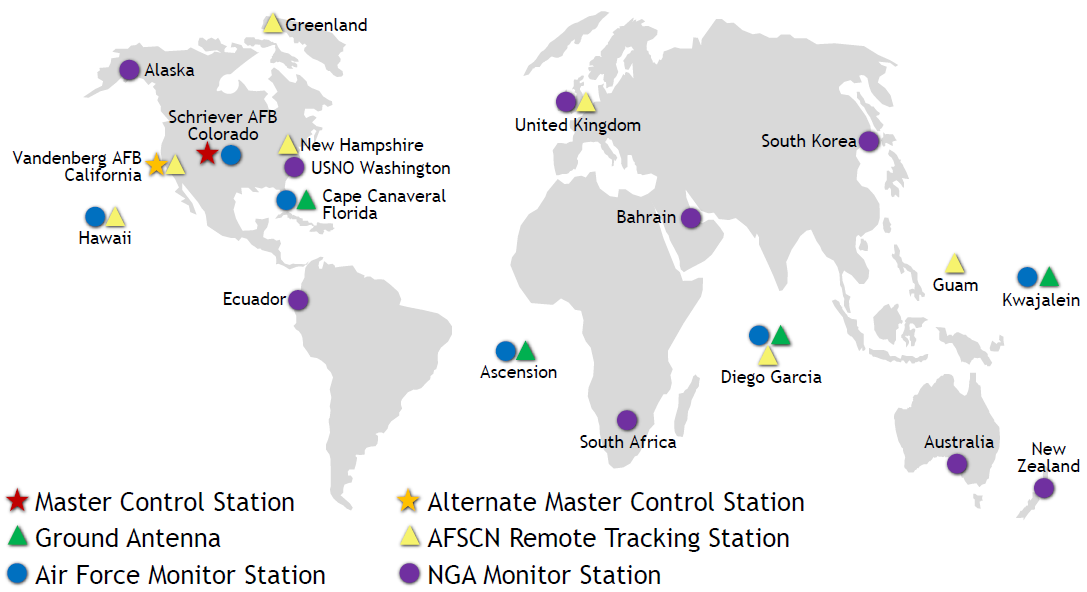 Localización de la estaciones del segmento Control |
Segmento del usuario |
Parte del sistema de los GNSS correspondiente a los receptores de las señales. |
Segmento espacial (tramo espacial) |
La parte del sistema de los GNSS que se encuentra en el espacio; es decir, los satélites. 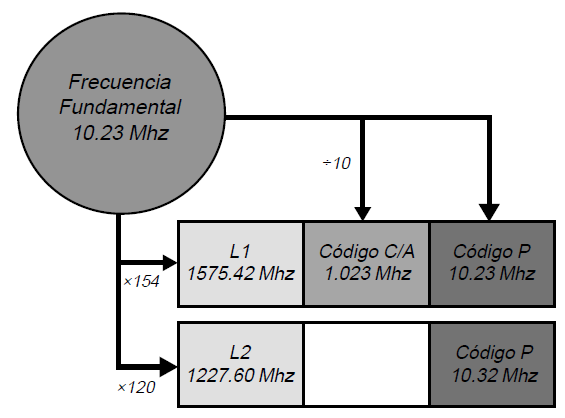 Estructura de la señal GPS |
Seguimiento o rastreo asistido mediante portadora |
Técnica de tratamiento de señal en que se utiliza la señal portadora de los GNSS para lograr un enganche exacto con el código pseudoaleatorio generado por el satélite. |
Servicio abierto |
Servicio de transmisión de una o más señales en régimen abierto y sin cargas directas para los usuarios. |
Servicio autorizado |
Servicio concebido expresamente para satisfacer las necesidades de usuarios autorizados en el desempeño de funciones gubernamentales. |
Servicio de localización normalizado (SPS) |
Servicio del GPS que alcanza un grado de precisión en la determinación puntual de la posición basado en el código C/A de frecuencia única. Además, el SPS permite obtener la máxima exactitud a los usuarios que utilizan receptores de frecuencia doble con codificación parcial y varios sistemas de corrección diferencial. |
Nivel de precisión en el posicionamiento de un punto obtenido con GPS, basado en el código C/A de una frecuencia. |
|
Servicio de posicionamiento preciso (PPS) |
Nivel más alto de precisión de posicionamiento puntual, proporcionado por el sistema GPS. Se basa en el código P de doble frecuencia. |
Servicio Internacional de Sistemas de Referencia y Estudio de la Rotación de la Tierra (IERS) |
Órgano responsable de mantener los patrones horarios y el marco de referencia a nivel mundial, en particular por conducto de sus grupos encargados del parámetro de orientación de la Tierra (EOP), el Sistema Internacional de Referencia Celeste (ICRS) y el Sistema Internacional de Referencia Terrestre (ITRS). Hasta el 2 de abril de 2002, año en que cambió oficialmente de nombre, la organización se llamaba Servicio Internacional de Rotación de la Tierra. La organización optó por conservar la sigla en inglés IERS. |
Servicio internacional de sistemas mundiales de navegación por satélite, anteriormente Servicio de GPS Internacional (IGS) |
Federación de voluntarios integrada por más de 200 organismos de todo el mundo, que suman sus recursos y los datos de sus estaciones permanentes del GPS y del GLONASS para generar productos de precisión de ambos servicios. |
Servicio Internacional de Telemetría por Láser (ILRS) |
Red mundial de estaciones de observación que miden la duración del viaje en ambos sentidos de impulsos luminosos ultracortos transmitidos hacia satélites dotados de retrorreflectores. |
Servicio internacional de VLBI |
Iniciativa internacional de colaboración entre organizaciones que utilizan o apoyan componentes de interferometría de muy larga línea de base (VLBI). |
Servicio preciso de localización (PPS) |
El nivel más elevado de precisión de la localización puntual que alcanza el GPS, basado en señales de doble frecuencia. |
Servicios para la seguridad de la vida humana |
Los que utilizan usuarios para quienes la seguridad es de importancia decisiva, por ejemplo, en los sectores marítimo, aeronáutico y ferroviario, cuyas aplicaciones u operaciones deben regirse por criterios estrictos de fiabilidad de las prestaciones. |
Sesión de observación |
Período durante el cual dos o más receptores registran simultáneamente datos de los GNSS. |
Seudolite |
Estación GPS terrena diferencial que transmite una señal con estructura similar a la de un satélite GPS. |
Seudorango |
Medición del tiempo de propagación de la señal aparente de un satélite a una antena receptora, referido en distancia dividida entre la velocidad de la luz. El tiempo de propagación aparente es la diferencia entre el momento de la recepción de la señal (medido en el receptor) y el tiempo de emisión (medido por el satélite). El seudorango difiere del intervalo actual por la influencia del reloj del satélite contra el reloj del usuario. |
SIG |
|
Sistema de aumentación de área amplia (WAAS) |
Sistema de navegación aérea creado por la Administración Federal de Aviación de los Estados Unidos de América para aumentar el GPS. |
Sistema de aumentación de área local (LAAS) |
Sistema utilizado para el aterrizaje de aeronaves en todas las condiciones meteorológicas. Se basa en correcciones diferenciales en tiempo real de la señal del GPS. Los receptores de referencia locales envían datos a un punto central del aeropuerto. Esos datos se utilizan para formular un mensaje de corrección, que se transmite luego a los usuarios a través de un enlace de datos de muy alta frecuencia (VHF). Un receptor instalado en la aeronave utiliza esa información para corregir las señales del GPS. La Organización de Aviación Civil Internacional (OACI) llama a este tipo de sistema Sistema de aumentación basado en tierra (Ground-based Augmentation System) (GBAS). |
Sistema de aumentación basado en tierra (GBAS) |
Estaciones localizadas con que se apoyan, en la navegación de zona (RNAV), las operaciones de aproximación de precisión y en la zona del terminal. |
Sistema que capta, guarda, analiza, gestiona y presenta datos referentes a una ubicación geográfica o que guardan relación con ella. |
|
Sistema de navegación aumentado geoestacionario con GPS (GAGAN) |
Sistema de aumentación basado en satélite (SBAS) que proyecta establecer la India. Su objetivo es aumentar la precisión de los receptores de GNSS generando señales de referencia. Al convertirse en sistema operacional, se prevé que su segmento espacial consistirá en dos satélites geoestacionarios, ubicados a 82° E y 55° E, respectivamente, que llevarán sendos transpondedores por guíaondas acodado. Se agregará un satélite de reserva en órbita (ubicado a 83° E). |
Sistema de navegación por satélite COMPASS/BeiDou |
El sistema mundial de navegación de China. Consta de cinco satélites geoestacionarios y 30 no geoestacionarios. Los satélites geoestacionarios están situados en 58,75° E, 80° E, 110,5° E, 140° E y 160° E.  |
Sistema de posicionamiento global (GPS) |
El Sistema de Posicionamiento Global (GPS) es un sistema de radionavegación de los Estados Unidos de América, basado en el espacio, que proporciona servicios fiables de posicionamiento, navegación, y cronometría gratuita e ininterrumpidamente a usuarios civiles en todo el mundo. A todo el que cuente con un receptor del GPS, el sistema le proporcionará su localización y la hora exacta en cualesquiera condiciones atmosféricas, de día o de noche, en cualquier lugar del mundo y sin límite al número de usuarios simultáneos. |
Sistema de satélites cuasi cenitales |
Sistema regional de localización, navegación y cronometría basado en el espacio, promovido por el Gobierno del Japón. Abarca la región de Asia oriental y Oceanía, y transmite cuatro señales de GPS interoperables y dos de aumento, a fin de mejorar la disponibilidad y el rendimiento actuales del GPS. |
Sistema de uso dual |
Sistema utilizado para fines civiles y de defensa. |
Sistema Doppler de orbitografía y radiolocalización integradas por satélite (DORIS) |
Sistema francés que utiliza mediciones Doppler de radiotransmisiones desde balizas en tierra para determinar las órbitas de satélites dotados de receptores especiales y las posiciones de las estaciones transmisoras. |
Sistema Europeo de Complemento Geoestacionario de Navegación (EGNOS) |
El EGNOS suministra una señal de aumento al servicio normalizado de localización del GPS. Esa señal se transmite en la misma banda de frecuencia y con idéntica modulación que la señal civil L1 de código C/A (1575,42 MHz) del GPS. Mientras que el GPS utiliza señales de determinación de la posición y cronometría generadas desde vehículos espaciales que orbitan la Tierra, prestando con ello un servicio mundial, el EGNOS suministra información a efectos de corrección e integridad cuyo objeto es mejorar los servicios de navegación para la determinación de la posición en Europa. |
Iniciativa puesta en marcha por la Comisión Europea y la Agencia Espacial Europea. Se trata de un sistema mundial de navegación por satélite de propiedad de la Unión Europea, que presta servicios mundiales de determinación muy precisa y garantizada de la posición, bajo control civil. La constelación nominal de Galileo comprende un total de 27 satélites, distribuidos por igual en tres planos orbitales inclinados 56° respecto del ecuador. Hay nueve satélites activos por plano orbital, que ocupan posiciones orbitales de distribución. Tres satélites de reserva (uno por plano orbital) complementan la constelación nominal. Los satélites de Galileo están situados en órbitas terrestres circulares con un semieje mayor nominal de unos 30.000 km y un período de revolución aproximado de 14 horas. |
|
Sistema Geodésico Mundial 1984 (WGS 84) |
Sistema de referencia terrestre y dátum geodésico centrado y fijo en la Tierra. El WGS 84 se basa en una serie de constantes y parámetros modelo que describen el tamaño, la forma, la gravedad y los campos geomagnéticos de la Tierra. Por definición el WGS 84 es el sistema de referencia mundial que utiliza el Departamento de Defensa de los Estados Unidos como fuente de información geoespacial, y también se utiliza como sistema de referencia en el GPS. Es compatible con el Sistema internacional de referencia terrestre (ITRS, por su sigla en inglés). |
Sistema Internacional de Referencia Celeste |
Sistema normalizado de referencia celeste en vigor que ha adoptado la Unión Astronómica Internacional (UAI). Tiene su origen en el baricentro del sistema solar, y se da por entendido que sus ejes están fijos con respecto al espacio. |
Sistema Internacional de Referencia Terrestre (ITRS) |
Sistema que describe procedimientos para crear marcos de referencia adecuados que puedan utilizarse en mediciones en la superficie de la Tierra o cerca de ella. |
Sistema Mundial de Determinación de la Posición (sistema mundial de localización) (GPS) |
Sistema mundial de navegación por satélite establecido por los Estados Unidos de América. La constelación básica del GPS consta de 24 posiciones, distribuidas uniformemente en seis planos orbitales. Tres de esas posiciones son extensibles y pueden ser ocupadas por un máximo de dos satélites. Los satélites que no se encuentran en una posición definida de la constelación del GPS ocupan otros sectores de los seis planos orbitales. Los parámetros orbitales y los segmentos asignados de referencia de la constelación a contar de la época definida se establecen en la cuarta edición de las especificaciones de funcionamiento del servicio uniforme de localización (Standard Positioning Service Performance Specification) del GPS, de septiembre de 2008. En esa fecha, la constelación del GPS tenía 30 satélites activos que transmitían señales de navegación limpias, 11 en el Bloque IIA, 12 en el Bloque IIR y 7 en el Bloque IIR-M. |
Sistema Mundial de Satélites de Navegación (GLONASS) |
Sistema mundial de satélites de navegación administrado por la Federación de Rusia. La constelación básica nominal de GLONASS consta de 24 satélites Glonass-M, distribuidos de manera uniforme en tres planos orbitales aproximadamente circulares, con una inclinación de 64,8º respecto del ecuador. La altitud de la órbita es de 19.100 km. El período orbital de cada satélite es de 11 horas, 15 minutos y 45 segundos. Los planos orbitales están separados por una ascensión recta del nodo ascendente de 120º. En cada plano hay ocho satélites equidistantes, con una elongación nodal de 45º. Además, la elongación nodal de cada plano orbital tiene un desplazamiento de 15º respecto de los demás. |
Sistemas de aumentación basados en satélites (SBAS) |
Sistemas como EGNOS, GAGAN y WAAS, que complementan los GNSS existentes. |
Sistemas de satélites Transit, antecesor del GPS |
Sistema de satélites de navegación que funcionó de 1967 a 1996. |
Sistemas de uso común |
|
Sitio |
Punto en el que se establece un receptor para determinar coordenadas. |
Experimento mediante giroscopios sobre la teoría de la relatividad, realizado por la NASA y la Universidad de Stanford para poner a prueba dos predicciones extraordinarias y sin verificar de la teoría general de la relatividad de Albert Einstein. |
|
SPS |
Acrónimo de Servicio de localización normalizado (del GPS). |
Superficie equipotencial |
Superficie definida matemáticamente en que el potencial gravitacional
es el mismo en cualquier punto. |
Telemetría |
Tecnología que permite la medición a distancia y la comunicación de información de interés al creador u operador del sistema. |
Telemetría (Ranging) |
Técnica utilizada para determinar una línea de posición calculando la distancia entre un receptor y un punto de referencia conocido. |
Telemetría de la Luna por láser |
Medición de la distancia de ida y vuelta recorrida por impulsos luminosos entre estaciones ubicadas en Tierra y cuatro retrorreflectores instalados en la superficie de la Luna. En abril de 2010 se localizó el retrorreflector Lunokod 1; en la actualidad se utilizan cinco de esos aparatos. |
Medición de la distancia a un satélite mediante impulsos de láser. |
|
Teleorden |
Orden que se envía para controlar un sistema o sistemas remotos que no están directamente conectados (por ejemplo, mediante cables) con el lugar desde el que se envía esa orden. |
Tiempo de adquisición |
El tiempo que requiere un receptor de satélite para obtener señales de satélite y determinar la posición inicial. |
Tiempo GPS |
Sistema de tiempo continuo basado en el Tiempo de Coordenadas Universales (Coordinated Universal Time (UTC)) del 6 de enero de 1980. |
Tiempo medio de Greenwich (GMT) |
Tiempo medio solar del Meridiano de Greenwich. Se emplea como base para establecer el tiempo o la hora estándar a nivel mundial. |
Tiempo sidéreo |
Tiempo definido como el ángulo horario del equinoccio vernal. Al utilizar como referencia el equinoccio medio se obtiene el tiempo sidéreo real o aparente. |
Tiempo universal |
Tiempo medio solar local en el Meridiano de Greenwich. |
Tomografía |
Obtención de imágenes por secciones. |
Topografía |
Ciencia de la representación gráfica de la forma y los detalles de la superficie de una región determinada. |
Transformación |
Conversión de coordenadas para pasarlas de un sistema a otro. |
Transit |
Antecesor del sistema GPS. Sistema de navegación satelitar que estuvo en servicio de 1967 a 1996. |
Translocalización |
Método consistente en utilizar datos simultáneos de distintas estaciones para determinar la posición relativa de una estación con respecto a otra. |
Tratamiento (procesamiento) a posteriori |
Cálculo de la posición en tiempo real utilizando datos reunidos anteriormente por los receptores de GNSS. |
TTC |
Sigla en inglés de Telemetría, seguimiento y control. |
TWTA |
Sigla en inglés de Amplificador de tubos de ondas progresivas. |
TWSTFT |
Sigla en inglés de Transferencia de señales horarias y frecuencias por satélite en ambos sentidos. |
UIGG |
Acrónimo de Unión Internacional de Geodesia y Geofísica. |
Ultra alta frecuencia |
Ondas decimétricas (UHF). Gama de frecuencias entre 300 MHz y 3 GHz (3000 MHz). |
Unión Internacional de Geodesia y Geofísica (UIGG) |
Organización internacional dedicada a promover y comunicar los conocimientos sobre el sistema de la Tierra, su entorno espacial y los procesos dinámicos que ocasionan cambios. |
USAF |
Sigla en inglés de Fuerza Aérea de los Estados Unidos. |
USCG |
Sigla en inglés de Guardia Costera de los Estados Unidos. |
USNO |
Sigla en inglés de Observatorio Naval de los Estados Unidos |
UTC (NIST) |
Sigla en inglés de Hora universal coordinada del Instituto Nacional de Normalización y Cronometría. La UTC (NIST) es una escala cronométrica local basada en la HUC y obtenida mediante un conjunto de osciladores atómicos ubicados en Boulder, Colorado (Estados Unidos). |
UTC (USNO) |
Sigla en inglés de Hora universal coordinada del Observatorio Naval de los Estados Unidos. La UTC (USNO) es una escala cronométrica local basada en la HUC y obtenida mediante un conjunto de osciladores atómicos ubicados en el Observatorio Naval de los Estados Unidos. |
UTM |
Es una variante de la proyección Transversa de Mercator. Se
divide en diferentes zonas, cada una de 6° de ancho, con un factor central de escala de 0.996. La zona a emplear dependerá de la posición del usuario
sobre la Tierra. |
UWB |
Ver Banda ultra ancha. |
Vacío(s) por DOP (DOP hole(s)) |
Configuraciones (posiciones en el cielo) de vehículos espaciales que resultan en valores elevados de GDOP y por consiguiente conducen a grandes errores en la determinación de la posición. |
VDOP |
Sigla en inglés de Dilución de la precisión vertical. |
Velocidad de chip (velocidad de datos codificados; frecuencia de segmentos) |
Número de chips (datos codificados, segmentos) por segundo (por ejemplo, en el código C/A, 1,023*106 ciclos por segundo). |
Vigilancia |
Observación de una zona o espacio para determinar la posición y el movimiento de embarcaciones, aeronaves u otro tipo de vehículos en esa zona o espacio. |
Volumen de servicio espacial |
En el GPS de los Estados Unidos, el espacio esférico que se extiende desde la superficie exterior del volumen de servicio terrestre hasta una altitud de 36.000 km sobre el nivel medio del mar (aproximadamente, la altitud de la órbita geosíncrona) se conoce como volumen de servicio espacial (SSV-GPS). |
Volumen de servicio terrestre |
En el caso del GPS de los Estados Unidos, región cercana a la Tierra que se extiende desde su superficie hasta una altitud de 3.000 km sobre el nivel medio del mar. Se representa con la sigla en inglés TSV-GPS. |
WGS 84 |
Siglas de World Geodetic System 1984. Sistema al cual están referidas todas las mediciones y resultados GPS. |
Zona de confluencia costera |
Zona comprendida entre la entrada de un puerto y la línea ubicada a 50 millas marinas o el borde de la plataforma continental isóbata de 100 brazas, si esta distancia es mayor. |
|
A D V E R T E N C I A Este glosario de términos es una recopilación razonada de aquellos términos de uso corriente. Se ha confeccionado a partir de otros trabajos y no tiene, ni pretende tener, carácter de diccionario, en tanto no hay aquí ese tipo de elaboración, cuyo resultado excede la mera recopilación, aunque ésta también tenga su mérito. |
|
![]()
| Red Radio de Emergencia - R E M E R - | DGPCE |